技術開発
フレキシブルダクト施工支援ロボットを開発
~高所作業時間を50%以上削減、試験運用を開始~
2026年2月24日
三機工業株式会社(社長:石田 博一)は、建築設備工事における高所作業の大幅な削減が可能な「フレキシブルダクト施工支援ロボット」を開発し、試験運用を開始しました。本ロボットの活用をとおして、施工現場における高所作業の削減と安全性の向上、作業の効率化に向け、施工DXを推進してまいります。
|
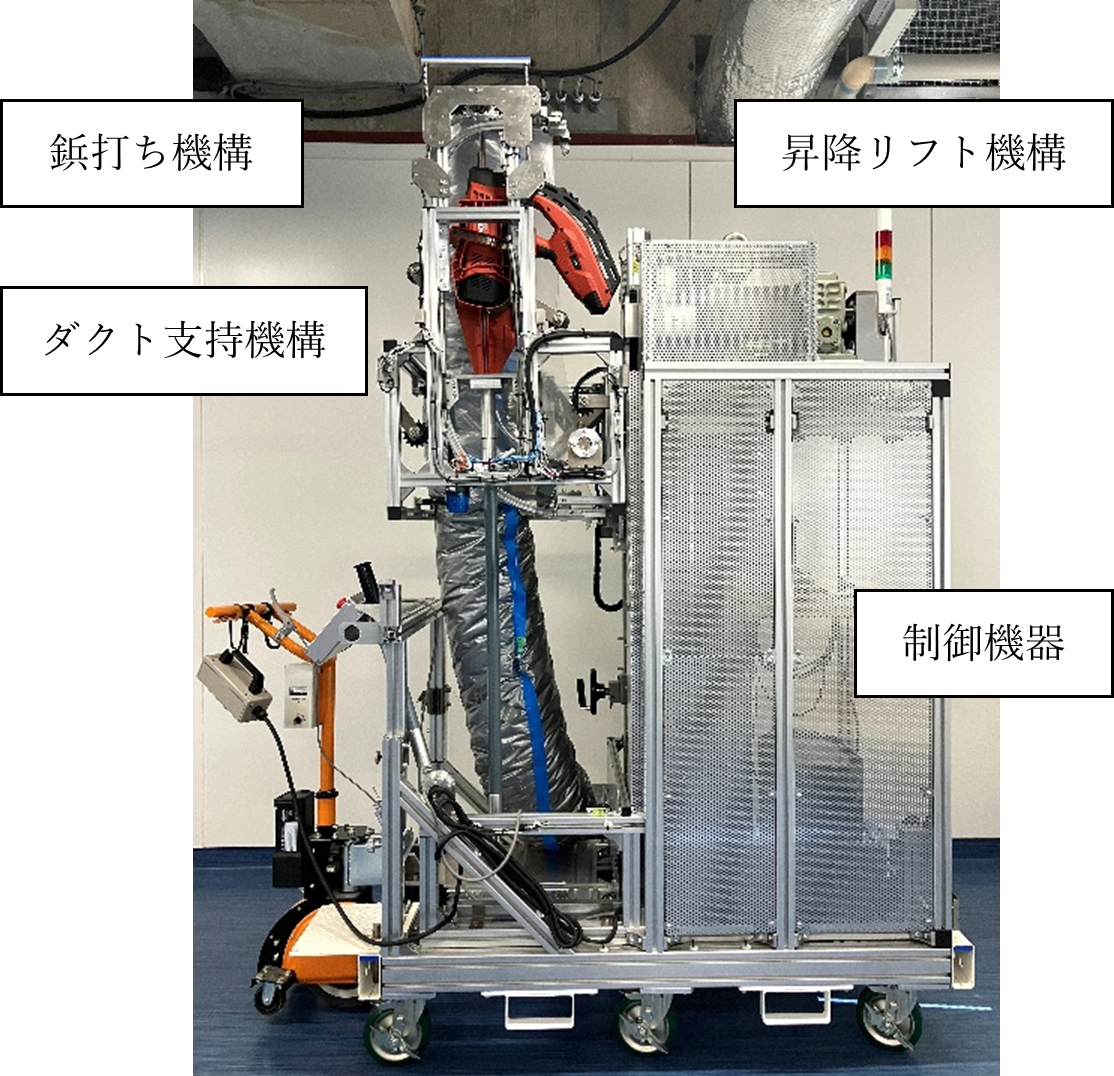
フレキシブルダクト施工支援ロボット外観 |
ロボットを用いた工法 |

■施工支援ロボットの開発背景
建設業における就業者不足や働き方改革などの課題解決のため、建設現場におけるロボット活用の重要性が高まっています。従来、空調用ダクトや制気口を施工する際は高所作業車や仮設足場等を用いた高所作業を行ってきました。この作業は、重量のある工具を支持しながら施工物を固定する上向き作業となり、高層ビルでは施工箇所が1,000ヵ所以上になります。そこで、施工数が多い「フレキシブルダクトの吊り込み作業」を対象にした施工支援ロボットを独自開発し、当社施工現場における試験運用の結果、高所作業時間の50%以上を削減することができました。
■フレキシブルダクト施工支援ロボットの基本構成
基本構成は、「吊り元を打設する鋲打ち機構」、「ダクト支持機構および昇降リフト機構」、「制御機器」からなります。従来の施工現場で行われていた高所作業車、足場などを用いた高所作業を施工支援ロボットに置き換えて、地上面から行うことを可能にしました。
■主な特長
1.高所作業時間を50%以上削減
天井面へ施工物と工具(鋲打ち機)をリフトで自動昇降させ、吊り込み作業の大半を地上面で行うことが可能となる機構(特許出願済み)により従来工法に比べて高所作業時間を大幅に削減することができます。
2.作業者の負荷を軽減、上向き作業時間を20%以上削減
作業性向上による疲労感の軽減と、高所作業の大幅な削減による安全性向上を実現しました。
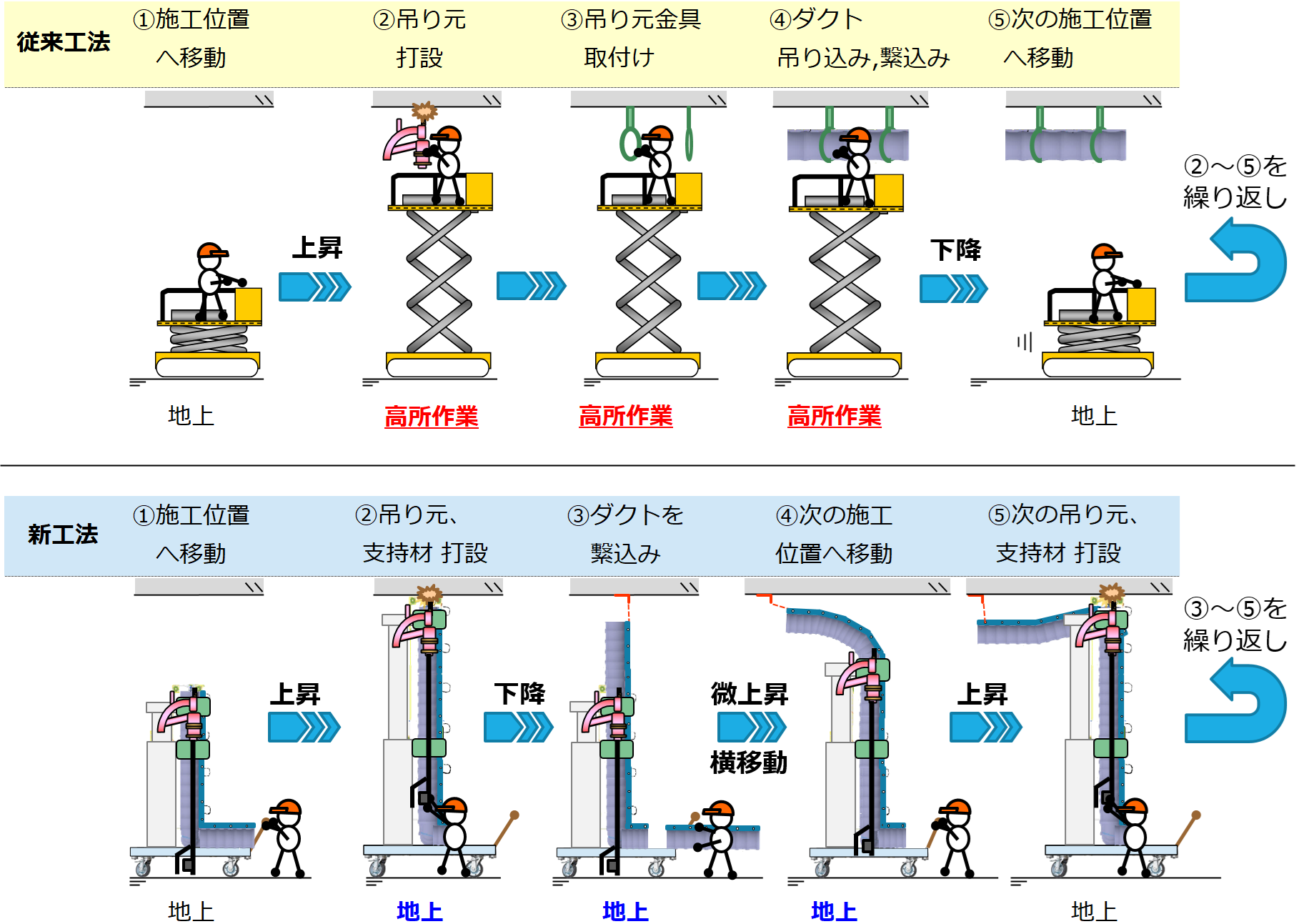 「従来工法」の②~④「高所作業」を、「新工法」では「地上」から実施することが可能
「従来工法」の②~④「高所作業」を、「新工法」では「地上」から実施することが可能
ダクト施工の流れ
■今後の展望
実現場において本ロボットの運用実績を重ね、ロボット活用による業務の合理化、生産性および品質の向上への取り組みと技術開発を行ってまいります。